最速降线
问题描述
最速降线是最著名的变分问题。
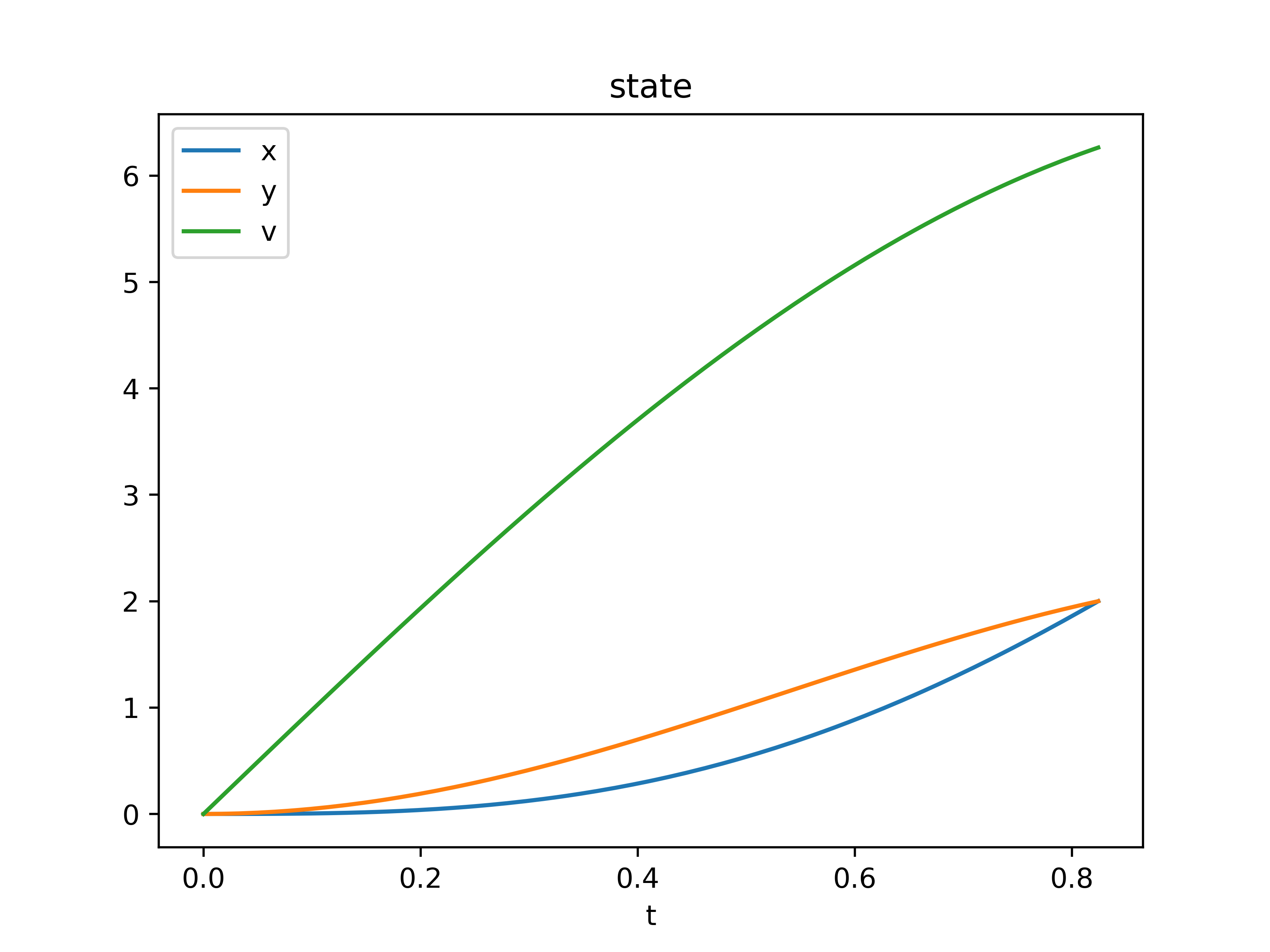
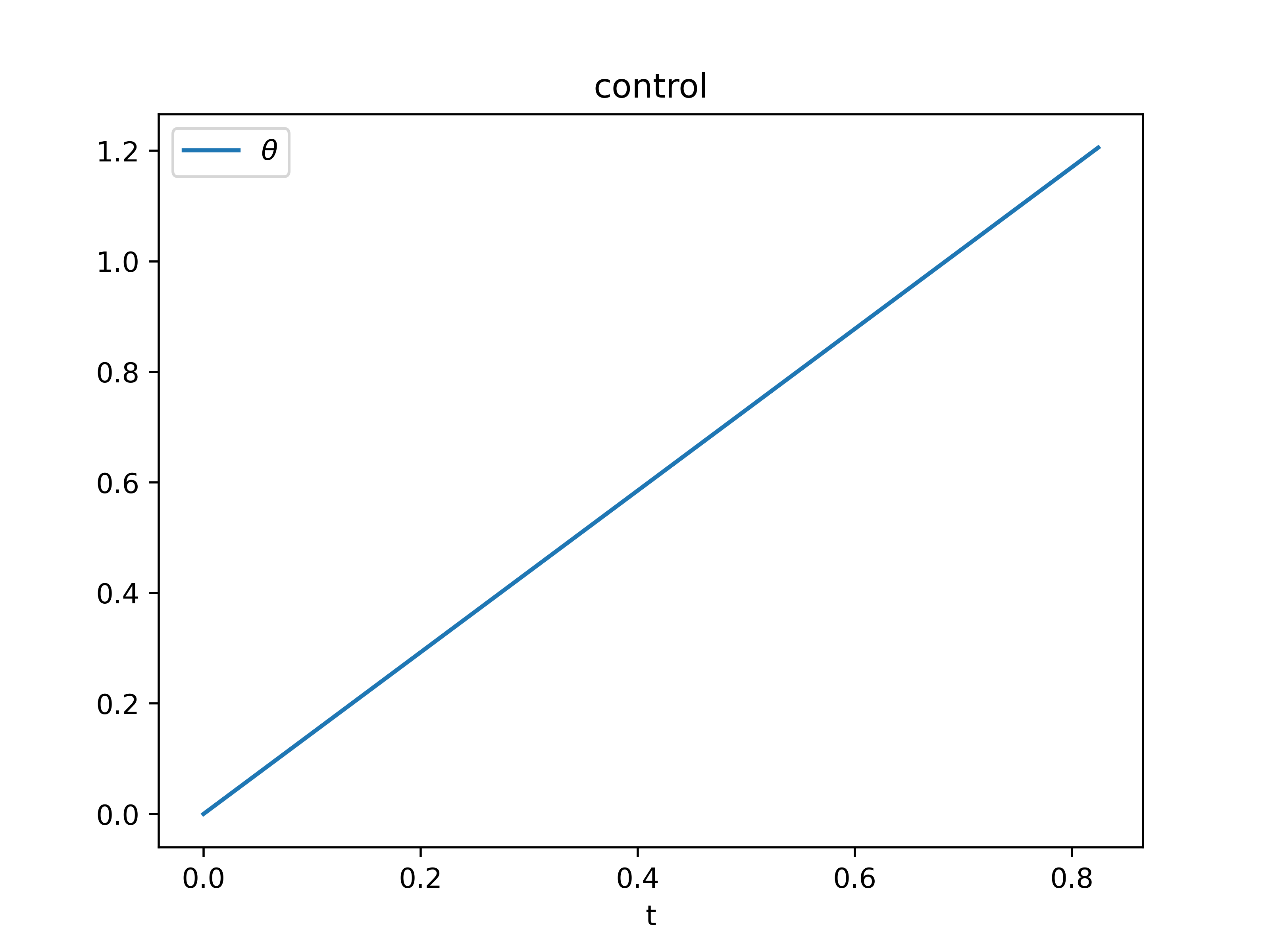
系统仅包含一个阶段。有 \(n_x = 3\) 个状态变量(水平位移 \(x\),垂直位移 \(y\),速度 \(v\))和 \(n_u = 1\) 个控制变量(曲线切线的角度 \(\theta\))。
动力学方程为
$$ \dot x=v\sin\theta,\quad\dot y=v\cos\theta,\quad\dot v=g\cos \theta,\quad g=9.81 $$
系统有单个积分(时间区间长度)
$$ \mathbb{I} = \int_{t_0}^{t_f} 1 \mathrm dt $$
初始时间固定 \(t_0 = 0\),末端时间 \(t_f\) 自由,为优化变量。系统有边界条件
$$ \begin{align*} \boldsymbol{x}_0 &= \left[0,0,0\right]^\mathrm{T}\\ \boldsymbol{x}_f &= \left[2,2,\text{free}\right]^\mathrm{T} \end{align*} $$
系统层面,有目标函数
$$ \begin{equation*} F = \mathbb I \end{equation*} $$
计算程序
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from pockit.optimizer import ipopt
from pockit.lobatto import System, constant_guess
g = 9.81
S = System(0)
P = S.new_phase(3, 1)
x, y, v = P.x
theta, = P.u
P.set_dynamics([v * sp.sin(theta), v * sp.cos(theta), g * sp.cos(theta)])
P.set_integral([1])
P.set_boundary_condition([0, 0, 0], [2, 2, None], 0, None)
P.set_phase_constraint([theta], [-np.pi], [np.pi])
P.set_discretization(10, 8)
S.set_phase([P])
S.set_objective(P.I[0])
v = constant_guess(P)
v, info = ipopt.solve(S, v)
print(info['status_msg'].decode())
print(info['obj_val']) # 0.8243386694213402
plt.plot(v.t_x, v.x[0])
plt.plot(v.t_x, v.x[1])
plt.plot(v.t_x, v.x[2])
plt.title('state')
plt.legend(['x', 'y', 'v'])
plt.xlabel('t')
plt.show()
plt.plot(v.t_u, v.u[0])
plt.title('control')
plt.legend([r'$\theta$'])
plt.xlabel('t')
plt.show()
计算结果